Hola a tod@s,
Llevamos cuatro años involucrados en el desarrollo de distintos simuladores de conducción dotados de movimiento. Todo empezó cuando, de manera fortuita, vimos este vídeo
A partir de ese mismo instante empezó la principal tarea de todo proyecto emergente, la documentación.
Dimos casi desde el primer día con X-Simulator, el foro sobre simuladores caseros más concurrido y con más contenido que hay.
Empezamos a perfilar el nuestro y definimos sus tres pilares básicos:
- Estructura
- Decidimos construir un simulador con dos grados de libertad 2DOF usando motores de limpiaparabrisas a modo de actuadores de modo que debiamos idear un sistema permitiera dotar de movimiento moviendo el mínimo peso posible ya que los actuadores no tenían mucha potencia. La solución: una base "flotante" pivotando en su centro sobre una base fija.
- Hardware
- Para el sistema escogido debíamos utilizar una placa AVR (que recibiría las órdenes del PC) quien transmitiría a unas placa H-Bridge los impulsos recibidos si los potenciómetros de feedback indicaban que era posible. Éstas H-Bridge daban paso al cuadal de corriente de las fuentes de alimentación a los actuadores. Los actuadores al moverse cambiaban el valor de los potenciómetros de feedback lo que cerraba el círculo.
- Software
- En la web de X-simulator podéis encontrar un enlace a X-sim tools, un software muy completo y con muy buenos tutoriales de uso y configuración.
Una vez tuvimos claro como debía ser nuestro diseño, construimos un prototipo muy casero para verificar que éramos capaces de conseguir hacer un simulador dotado de movimiento.
La precariedad del prototipo es un claro reflejo del presupuesto que manejábamos.
La electrónica consistía en una placa avr y dos placas H-Bridges de construcción casera, con disipadores y sistema de refrigerado también hecho por nosotros, encapsulada en una fiambrera. Potenciómetros rotativos encapsulados en latas de atún con mucho termofusible de por medio.
La estructura también estaba hecha con material reciclado gracias a la generosidad de Nofre Vidal.
Pese a las evidentes condiciones precarias el proyecto llegó a culminarse.
Una vez demostrado que era una empresa factible para nosotros empezamos el proyecto real.
Lo primero fue rediseñar la estructura por una más escueta y que fuera capaz de amoldarse a usuarios de cualquier estatura "normal". Pese a la libertad que suponía el rediseño decidimos mantener una serie de puntos:
- La ubicación de los elementos (asiento, volante, pedales. palanca de cambios y pantalla)
- Los grados de libertad
- El sistema de pivotaje
- El tipo de actuadores
En cuanto a la electrónica, gracias a la gran cantidad de información que iba aportando la comunidad de x-sim, nos encontramos con que las placas AVR y H-Bridge se comercializaban y, por tanto, teníamos la posibilidad de adquirir un producto ya testeado y con garantías de éxito. Así que resolvimos muchos quebraderos de cabeza con la compra de los elementos necesarios.
Con lo que nos quedó un producto mucho mejor acabado, digno de ser presentado en sociedad participando el eventos como RetroMallorca o MallorcaGame.
Con lo que nos quedó un producto mucho mejor acabado, digno de ser presentado en sociedad participando el eventos como RetroMallorca o MallorcaGame.
Aún así, después de un tiempo de inactividad, volvimos a la carga queriendo rehacer por completo el simulador mejorando los puntos débiles de la primera versión.
Para ello contamos con la gran ayuda que nos ofreció Nofre Vidal, ayudándonos con el diseño y la construcción de una nueva estructura con los siguientes aspectos mejorados:
- Duplicamos el número de actuadores a pesar de mantener los grados de libertad actuales.
- Mucho más confortable y robusto.
- Más estético, con detalles de alta calidad (como soportes para altavoces) por tener a nuestra disposición una impresora 3D.
Con toda la experiencia acumulada, más conocimientos en áreas afines y más medios y presupuesto logramos llevar a cabo la construcción de la segunda versión del simulador en un espacio muy corto de tiempo.
Aquí podéis ver el progreso
...
Funcionamiento
A continuación os detallo los pormenores del funcionamiento de nuestro simulador separado en los diferentes apartados: Estructura, Software y Electrónica.
El conjunto de programas está compuesto por:
Electrónica
El hardware es la parte mas relevante en todo el conjunto. Existen muchas configuraciones diferentes de las que hacer uso.



Esquema de instalación

Existen mucho tipos de simuladores, difieren tanto en el diseño como en la tecnología que usan y su complejidad, coste de fabricación, tamaño y funcionalidad son muy diversas dependiendo de las tomas de decisión que se hagan.
Nosotros nos decidimos por desarrollar un simulador del que conociéramos la tecnología, que ésta estuviera a nuestro alcance y que el conjunto ocupase poco espacio.
El resultado fue la construcción de un simulador con 2 grados de libertad. Una estructura móvil pivotante en un punto sobre la parte fija del conjunto con los actuadores situados a ambos lados de la parte inferior, consiguiendo que el peso del conductor descanse sobre el punto pivotante, y por tanto, que los actuadores tengan que desplazar un peso bastante inferior al del conductor con lo que se puede hacer de actuadores más económicos.
Aquí tenéis una guía completa (despiece, medidas, planos, montaje, ...) para la construcción del simulador por el que optamos.
Software
Nosotros nos decidimos por desarrollar un simulador del que conociéramos la tecnología, que ésta estuviera a nuestro alcance y que el conjunto ocupase poco espacio.
El resultado fue la construcción de un simulador con 2 grados de libertad. Una estructura móvil pivotante en un punto sobre la parte fija del conjunto con los actuadores situados a ambos lados de la parte inferior, consiguiendo que el peso del conductor descanse sobre el punto pivotante, y por tanto, que los actuadores tengan que desplazar un peso bastante inferior al del conductor con lo que se puede hacer de actuadores más económicos.
Aquí tenéis una guía completa (despiece, medidas, planos, montaje, ...) para la construcción del simulador por el que optamos.
Software
X-Simulator package soft es un conjunto de programas que se encargan de transmitir la información de feedback del juego a la electrónica que se encarga del movimiento de los actuadores vía puerto serie.
Este software es apto para una gran variedad de juegos, podéis consultarlos aquí.
Este software es apto para una gran variedad de juegos, podéis consultarlos aquí.
El conjunto de programas está compuesto por:
- Force-Sender: Encargado de transmitir por red la información PC donde se ejecuta el juego al PC donde está instalado el X-SIM (puede ser el mismo PC. Para ello usar IP Broadcast)
- Force-Profiler: Software encarga de convertir la señal que envía force-sender en señal interpretable para el dispositivo. Existen "games profiles", que archivos en los que ya se han establecido los parámetros para el juego en cuestión.
- Yoda Force feedback escanner: Registra la información recibida del force-sender.
- Video plugin 2x: Asigna movimientos a videos. Se usa para hacer simuladores de realidad virtual.
Electrónica
El hardware es la parte mas relevante en todo el conjunto. Existen muchas configuraciones diferentes de las que hacer uso.
Los actuadores pueden eléctricos, neumáticos, hidráulicos, ... y la cantidad también puede variar según el tipo de simulador que queramos diseñar.
En mi caso se trata de un simulador con 2 grados de libertad (2DOF) que usa como actuadores 2 motores wiper.
Para que los actuadores se muevan acordes a los movimientos del coche del juego que tengamos en ejecución es necesario disponer de estos elementos:
- AVR: Este componente es quien recibe la información que envía el software x-sim al puerto serie. Dicha información es enviada a la H-Bridge, placa que tiene conectada a esta.
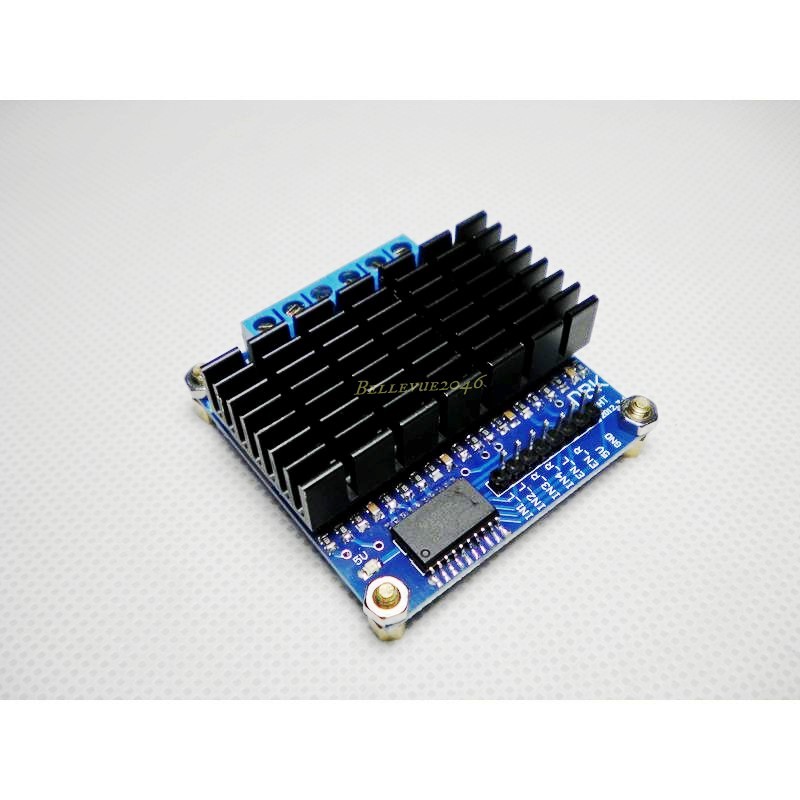
- H-BRIDGE: Este componente es quien, tras recibir la orden de envío de potencia de la placa AVR, envía la alimentación necesario a los actuadores para que estos se mueven en el sentido que deben.
- Wiper motor: Motores rotativos encargados de girar en un sentido u otro con un recorrido delimitado por un potenciómetro lineal. El movimiento rotativo de los motores se transforma en movimiento lineal por medio de unas bielas que anclan la parte móvil de la estructura al pivote del motor.
- Potenciómetro lineal: A mi juicio es la parte más artesanal del diseño. Ya que los motores carecen de información sobre la posición en la que se encuentran es necesario dotar al conjunto con un potenciómetro lineal por motor para que la AVR pueda saber en que posición se encuentra el motor y poder dejar la señal de movimiento a la H-Bridge cuando los potenciómetros indiquen que se ha llegado al valor indicado como final de carrera (Este valor se debe definir en el Force).
Esquema de instalación
Espero que os haya gustado y que os sirva de algo. Podéis contactar conmigo a través de mi mail anicolause@hotmail.com